معرفی
انواع مختلفی از ترمزهای الکترومغناطیسی (دندان، دیسک چندگانه، هیسترزیس، ذرات مغناطیسی) وجود دارد. پرکاربردترین نسخه طرح تک چهره است. ترمزهای الکترومغناطیسی به صورت الکتریکی عمل می کنند اما گشتاور را به صورت مکانیکی انتقال می دهند. به همین دلیل است که قبلاً از آنها به عنوان کلاچ و ترمز الکترو مکانیکی یاد می شد. با گذشت سالها، EM به عنوان الکترومکانیکی آیات الکترومغناطیسی شناخته شد و بیشتر در مورد روش تحریک آنها و عملکرد فیزیکی اشاره کرد. از زمانی که ترمزهای الکترومغناطیسی شروع به محبوب شدن کردند، بیش از هفتاد سال پیش، تنوع کاربردها و طرحهای ترمز به طور چشمگیری افزایش یافته است، اما عملکرد اصلی ترمز الکترومغناطیسی تک چهره هنوز یکسان است.
ساخت ترمز
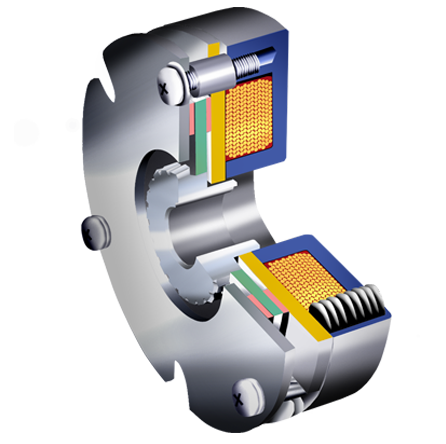
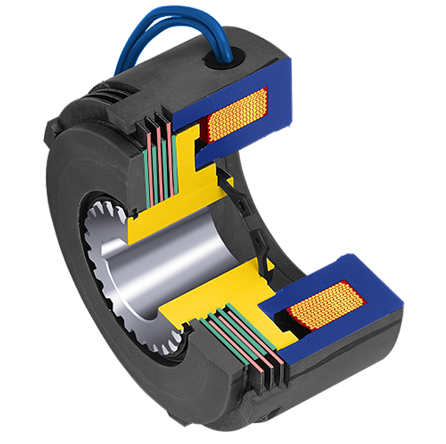
پوسته سیم پیچ را مانند آهنربای نعل اسبی در نظر بگیرید که دارای قطب شمال و جنوب است. اگر یک قطعه آهن با هر دو قطب تماس پیدا کند یک مدار مغناطیسی ایجاد می شود. هنگامی که برق اعمال می شود یک میدان مغناطیسی ایجاد می شود این میدان (شار) بر شکاف هوا بین میدان و آرمیچر غلبه می کند. این جاذبه مغناطیسی آرمیچر را در تماس با سطح میدان ترمز می کشد. اصطکاک و قدرت میدان مغناطیسی چیزی است که باعث توقف حرکت چرخشی می شود. تقریباً تمام گشتاور ناشی از جاذبه مغناطیسی و ضریب اصطکاک بین فولاد آرمیچر و فولاد روتور یا میدان ترمز است. اما برای بسیاری از کلاچ ها یا ترمزهای صنعتی از مواد اصطکاکی بین قطب ها استفاده می شود. این ماده عمدتاً برای کمک به کاهش نرخ سایش استفاده می شود. اما از انواع مختلف مواد نیز می توان برای تغییر ضریب اصطکاک برای کاربردهای خاص استفاده کرد. به عنوان مثال اگر ترمز نیاز به زمان طولانی برای توقف یا لغزش داشت، می توان از مواد با ضریب پایین استفاده کرد. برعکس، اگر ترمز باید گشتاور کمی بالاتری داشته باشد، می توان از مواد اصطکاک با ضریب بالا استفاده کرد.
از سیم آهنربایی مسی (گاهی اوقات آلومینیومی) برای ایجاد سیم پیچ استفاده می شود که در پوسته یا بوبین یا توسط اپوکسی/چسب نگه داشته می شود. برای اکثر ترمزهای صنعتی، مواد اصطکاکی روی سیم پیچ قرار می گیرند و بین قطب داخلی و خارجی قرار می گیرند. مواد اصطکاک با سطح ترمز هم سطح است زیرا می خواهید بین پوسته سیم پیچ و آرمیچر تماس فلز به فلز داشته باشید. (برخی افراد به اشتباه به ترمزهای الکترومغناطیسی نگاه می کنند و تصور می کنند که از قبل فرسوده شده است زیرا مواد اصطکاک تراز شده است، اما اینطور نیست.)
عمل
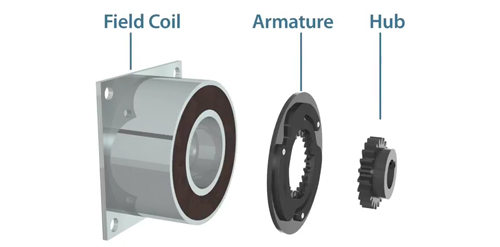
در ترمز، تنها سه بخش اصلی وجود دارد. میدان، آرمیچر و توپی (که ورودی ترمز است). معمولاً میدان مغناطیسی به چیزی جامد (یا دارای بازوی گشتاور) پیچ می شود. بنابراین هنگامی که آرمیچر به میدان جذب می شود، گشتاور توقف به محفظه میدان منتقل می شود و بار را کاهش می دهد. این می تواند خیلی سریع اتفاق بیفتد. اما زمان توقف ترمز را می توان با مقدار ولتاژ/جریان اعمال شده به میدان کنترل کرد.
هنگامی که میدان شروع به کاهش می کند، شار به سرعت سقوط می کند و آرمیچر جدا می شود. فنر(ها) آرمیچر را از سطح میدان آن در یک شکاف هوای از پیش تعیین شده دور نگه می دارد.
اهمیت ولتاژ/جریان
قدرت هر میدان مغناطیسی را می توان با تغییر اندازه سیم و مقدار سیم (چرخش) تغییر داد. ترمزهای EM مشابه هستند و از سیم مسی (گاهی اوقات آلومینیومی) برای ایجاد میدان مغناطیسی استفاده می کنند.
میدانهای ترمزهای EM را میتوان طوری ساخت که تقریباً در هر ولتاژ DC کار کنند و گشتاور تولید شده توسط ترمز تا زمانی که ولتاژ و جریان صحیح کار با ترمز صحیح استفاده شود یکسان خواهد بود. اگر یک ترمز 90 ولتی، ترمز 48 ولتی و ترمز 24 ولتی داشتید که همگی با ولتاژ و جریان مربوطه تغذیه می شدند، همه به همان میزان گشتاور تولید می کردند. با این حال، اگر یک ترمز 90 ولتی بگیرید و 48 ولت روی آن اعمال کنید، تقریباً نیمی از گشتاور صحیح خروجی از آن ترمز خارج می شود. این به این دلیل است که ولتاژ/جریان تقریباً خطی به گشتاور است.
اگر می خواهید گشتاور دقیق و حداکثری از ترمز داشته باشید، منبع تغذیه جریان ثابت بسیار مهم است. اگر از منبع تغذیه تنظیم نشده استفاده شود، شار مغناطیسی با بالا رفتن مقاومت سیم پیچ کاهش می یابد. اساساً هرچه سیم پیچ گرمتر شود گشتاور شما کمتر می شود.
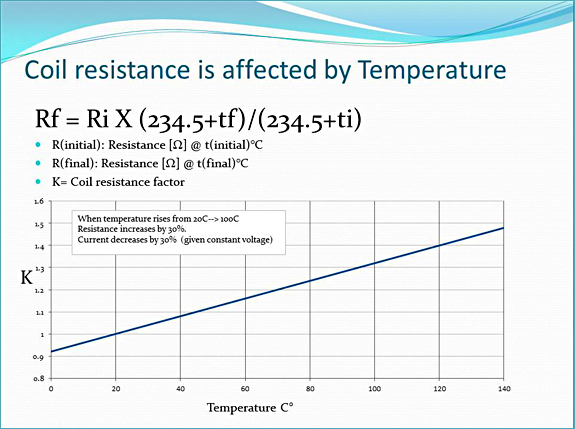
به ازای هر 20 درجه سانتیگراد حدود 8 درصد کاهش می یابد. اگر دما نسبتاً ثابت باشد و ضریب سرویس کافی در طراحی برای نوسانات جزئی دما وجود داشته باشد، کمی بزرگتر کردن ترمز می تواند کاهش شار را جبران کند. این امکان استفاده از منبع تغذیه اصلاح شده را فراهم می کند که بسیار ارزان تر از منبع تغذیه جریان ثابت است.
بر اساس V = I × R، با افزایش مقاومت، جریان موجود کاهش می یابد. افزایش مقاومت اغلب ناشی از افزایش دما با گرم شدن سیم پیچ است، با توجه به: Rf = Ri X (234.5 + tf / (234.5 + tf). که در آن Rf = مقاومت نهایی، Ri = مقاومت اولیه، 234.5 = ضریب دمای سیم مسی مقاومت، Tf = دمای نهایی، و Ti = دمای اولیه.
زمان توقف
در ترمز الکترومغناطیسی اولیه باید دو زمان درگیر شدن را در نظر گرفت. اولین مورد زمانی است که طول می کشد تا یک سیم پیچ میدان مغناطیسی آنقدر قوی ایجاد کند که بتواند آرمیچر را به داخل بکشد و جذب کند. در این سناریو دو عامل موثر بر این وجود دارد. اولین مورد، مقدار چرخش در یک سیم پیچ است که تعیین می کند با چه سرعتی یک میدان مغناطیسی ایجاد می شود. مورد دوم شکاف هوا است که فضای بین آرمیچر و صفحه ترمز است. این به این دلیل است که خطوط مغناطیسی شار به سرعت در هوا کاهش می یابد. هر چه قطعه جذاب از سیم پیچ دورتر باشد، مدت بیشتری طول می کشد تا آن قطعه در واقع نیروی مغناطیسی کافی ایجاد کند تا جذب شود و برای غلبه بر شکاف هوا به داخل بکشد. برای کاربردهای چرخه بسیار بالا می توان از آرمیچرهای شناور استفاده کرد که در مقابل صفحه ترمز قرار می گیرند. در این مورد شکاف هوا صفر است اما مهمتر از آن زمان پاسخ بسیار ثابت است زیرا شکاف هوایی برای غلبه بر وجود ندارد. شکاف هوا به ویژه در طراحی آرمیچر ثابت یک نکته مهم است زیرا با فرسودگی دستگاه در طول چرخه های زیادی درگیر شدن، آرمیچر و صفحه ترمز فرسوده می شوند و یک شکاف هوایی بزرگتر ایجاد می کنند که زمان درگیری ترمز را تغییر می دهد. در برنامه های با چرخه بالا که ثبت نام مهم است، حتی اختلاف 10 تا 15 میلی ثانیه می تواند در ثبت مواد رانده شده تفاوت ایجاد کند. حتی در یک برنامه چرخه معمولی، این مهم است زیرا ماشینی که در یک زمان خوب بود، در نهایت می تواند یک “دریفت” در ثبت خود ببیند.
عامل دوم در تعیین زمان پاسخ ترمز در واقع بسیار مهمتر از سیم آهنربا یا شکاف هوا است. این شامل محاسبه میزان اینرسی است که ترمز برای کاهش سرعت نیاز دارد. بسیاری از مشتریان از این زمان به عنوان زمان توقف یاد می کنند. در واقع این چیزی است که مشتری نهایی بیشتر به آن توجه دارد. هنگامی که مشخص شد چه مقدار اینرسی برای شروع یا توقف ترمز لازم است، می توان اندازه مناسب ترمز را انتخاب کرد. پیوند به یک سایت جداگانه www.inertia-calc.com به راحتی می تواند به شما در تأیید اینرسی و تعیین میزان گشتاور مورد نیاز برای شتاب دادن یا کاهش سرعت اینرسی در یک زمان خاص کمک کند. به یاد داشته باشید که مطمئن شوید گشتاور انتخاب شده برای ترمز باید بعد از سوختن ترمز باشد.
همچنین، سیستمهای CAD میتوانند به طور خودکار اینرسی اجزا را محاسبه کنند، اما کلید اندازهگیری ترمز محاسبه میزان انعکاس اینرسی به ترمز است. برای انجام این کار، مهندسان از فرمول استفاده می کنند: T = (WK2 × ΔN) / (308 × t) که در آن T = گشتاور مورد نیاز بر حسب پوند فوت، WK2 = اینرسی کل در lb-ft2، ΔN = تغییر در سرعت چرخش در دور در دقیقه و t = زمانی که در طی آن کاهش سرعت باید انجام شود.
چرا Burnishing مهم است
سوزاندن به پوشیدن یا جفت شدن سطوح مقابل گفته می شود. هنگامی که آرمیچر و صورت های ترمز تولید می شوند، چهره ها تا حد امکان صاف تراشیده می شوند. (بعضی از تولیدکنندگان نیز برای صاف تر شدن چهره ها را می زنند). اما اگر بخواهیم زیر میکروسکوپ به آنها نگاه کنیم، میبینیم که فرآیند ماشینکاری، قلهها و درههایی را روی سطح فولاد ایجاد میکند. هنگامی که یک ترمز جدید خارج از جعبه در ابتدا درگیر می شود، بیشتر قله ها روی هر دو سطح جفت شده لمس می شوند، به این معنی است که سطح تماس بالقوه می تواند به میزان قابل توجهی کاهش یابد. در برخی موارد می توانید ترمزهای خارج از جعبه را داشته باشید که فقط 60 درصد گشتاور خود را قبل از براق کردن دارند.
فرسودگی فرآیند چرخاندن ترمز برای از بین بردن آن قله های اولیه است تا تماس سطحی بیشتری بین وجه های جفت وجود داشته باشد.
حتی اگر برای خارج کردن گشتاور کامل از ترمز به برش زدن نیاز است، ممکن است در همه کاربردها لازم نباشد. به عبارت ساده، اگر گشتاور اعمالی کمتر از گشتاور اولیه ترمز باشد، نیازی به برش زدن نخواهد بود. با این حال اگر گشتاور مورد نیاز بیشتر باشد، باید صیقل دادن انجام شود. به طور کلی این تمایل بیشتر در ترمزهای با گشتاور بیشتر است تا ترمزهای گشتاور کمتر. این فرآیندها شامل چرخاندن ترمز چند بار با اینرسی کمتر، سرعت کمتر یا ترکیبی از هر دو است. سوزاندن بسته به اندازه ترمز و مقدار گشتاور اولیه مورد نیاز می تواند به 20 تا 100 چرخه نیاز داشته باشد. ترمزهایی که دارای آرمیچرهای مجزا هستند باید سعی کنند براقکاری روی ماشین روی نیمکت انجام شود. دلیل این امر این است که اگر براق کردن روی یک قطعه دو تکه روی نیمکت انجام شود و هنگامی که ترمز روی دستگاه سوار می شود تغییری در تحمل نصب وجود داشته باشد، تراز می تواند تغییر کند تا خطوط براق روی آرمیچر یا صفحه ترمز ممکن است تغییر کند. کمی خاموش شود و از دستیابی به گشتاور کامل کلاچ یا ترمز جلوگیری کند. باز هم تفاوت جزئی است، بنابراین این فقط در یک برنامه بسیار حساس به گشتاور مورد نیاز است.
کدام گشتاور مورد نیاز است
سوختن می تواند بر گشتاور اولیه ترمز تأثیر بگذارد، اما عواملی نیز وجود دارد که بر عملکرد گشتاور ترمز در یک کاربرد تأثیر می گذارد. اصلی ترین ولتاژ/جریان است. بخش ولتاژ/جریان نشان داد که چرا منبع جریان ثابت مهم است.
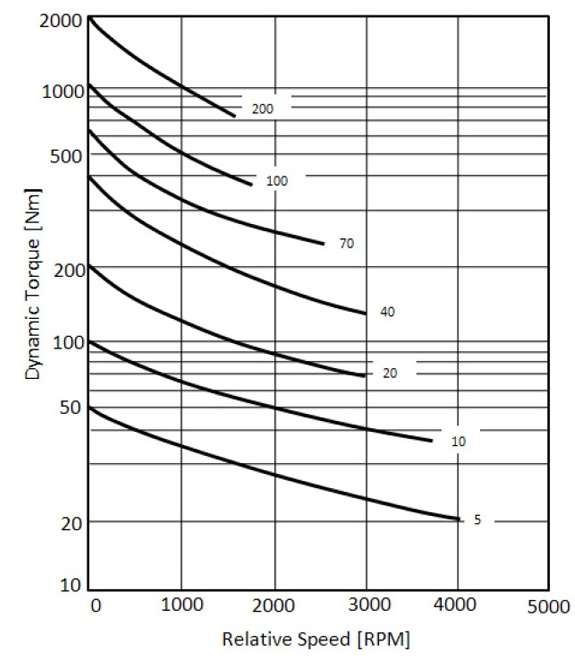
هنگام در نظر گرفتن گشتاور، گشتاور دینامیکی یا استاتیکی در کاربرد شما مهمتر است؟ به عنوان مثال، اگر ماشینی را با دور نسبتاً کم کار میکنید، واقعاً نگران گشتاور دینامیکی نیستید، زیرا رتبهبندی گشتاور استاتیک ترمز به جایی که در حال کار هستید نزدیکترین خواهد بود. اگر ماشینی را در 3000 دور در دقیقه کار میکنید و فکر میکنید که میخواهید ترمز را با گشتاور کاتالوگ آن در آن دور در دقیقه فشار دهید، اشتباه میکنید. تقریباً همه تولیدکنندگان گشتاور استاتیکی را برای ترمزهای خود در کاتالوگ خود قرار می دهند. اگر میخواهید نرخ پاسخدهی خاصی را تعیین کنید، باید بدانید که درجه گشتاور دینامیکی برای آن ترمز خاص در سرعتی که در حال اجرا هستید چقدر است. در بسیاری از موارد این می تواند قابل توجه باشد، می تواند کمتر از نیمی از امتیاز گشتاور استاتیک باشد. اکثر تولیدکنندگان منحنی های گشتاور را منتشر می کنند که رابطه بین گشتاور دینامیکی و استاتیکی را برای یک سری معین از ترمزها نشان می دهد.
چه زمانی باید از Over Excitation استفاده شود؟
بیش از حد تحریک برای دستیابی به زمان پاسخ سریعتر استفاده می شود. زمانی است که یک سیم پیچ به طور لحظه ای ولتاژ بالاتری نسبت به امتیاز اسمی خود دریافت می کند. برای موثر بودن ولتاژ اولیه در راش باید به طور قابل توجهی، اما نه در حد کاهش بازده، بالاتر از ولتاژ سیم پیچ معمولی باشد. یک قانون کلی معمولی این است که 15 برابر ولتاژ سیم پیچ معمولی، زمان پاسخگویی 3 برابر سریعتر ایجاد میکند. به عنوان مثال، اگر یک سیم پیچ ترمز با ولتاژ 6 ولت داشتید، برای رسیدن به ضریب 3 برابر باید 90 ولت را وارد کنید.
با تحریک بیش از حد، جریان راش لحظه ای است. اگرچه به اندازه سیم پیچ بستگی دارد، اما زمان واقعی معمولاً بین 10 تا 20 میلی ثانیه است. تئوری این است که شما می خواهید سیم پیچ به همان سرعتی که ممکن است میدان مغناطیسی ایجاد کند تا آرمیچر را جذب کند و روند کاهش سرعت را آغاز کند. هنگامی که بیش از حد تحریک دیگر مورد نیاز نباشد، منبع تغذیه ترمز به ولتاژ کاری عادی خود باز می گردد. در این مورد 6 ولت خواهد بود. این فرآیند را می توان چندین بار تکرار کرد تا زمانی که ولتاژ بالا به اندازه کافی در سیم پیچ باقی نماند که باعث گرم شدن بیش از حد سیم سیم پیچ شود.
تحریک بیش از حد نیز می تواند در ترمزهای نگهدارنده فنری الکترومغناطیسی استفاده شود (به زیر مراجعه کنید). در این نوع کاربرد، افزایش میدان مغناطیسی به غلبه بر شکاف هوای بزرگ کمک می کند، اما هنگامی که ترمز درگیر شد، می توان ولتاژ سیم پیچ را کاهش داد تا نیروی فنرها را مهار کند. این به مهندسان طراح اجازه می دهد تا اندازه ترمز صرفه جویی در انرژی را کاهش دهند.
سایش – چه چیزی در ترمزهای الکترومغناطیسی می پوشد؟
بسیار نادر است که یک سیم پیچ در یک ترمز الکترومغناطیسی کار خود را متوقف کند. معمولاً اگر یک سیم پیچ از کار بیفتد، معمولاً به دلیل گرما است که باعث خراب شدن عایق سیم سیم پیچ شده است. این گرما می تواند ناشی از دمای بالای محیط، نرخ چرخه بالا، لغزش یا اعمال ولتاژ بالا باشد. همان عمر طولانی معمولاً برای یاتاقان ها صادق است تا زمانی که از آنها فراتر از درجه بندی آنها استفاده نشود.
اکثر سایش ترمزهای الکترومغناطیسی روی سطوح جفت شده رخ می دهد. هر بار که ترمز در حین چرخش درگیر می شود مقدار معینی از انرژی به عنوان گرما منتقل می شود. انتقال، که در حین چرخش اتفاق می افتد، هم آرمیچر و هم سطح تماس مقابل را فرسوده می کند. بر اساس اندازه ترمز، سرعت و نرخ سایش اینرسی متفاوت خواهد بود. به عنوان مثال، ماشینی که در 500 دور در دقیقه با ترمز کار می کرد و اکنون تا 1000 دور در دقیقه سرعت می گیرد، سرعت سایش آن به طور قابل توجهی افزایش می یابد زیرا مقدار انرژی مورد نیاز برای راه اندازی همان مقدار اینرسی در سرعت های بالاتر بسیار بیشتر است. در واقع دو برابر خواهد بود. به عبارت ساده، میزان سایش شما دو برابر خواهد شد، بنابراین نیمی از عمر ترمزی که قبلا دریافت کرده بودید، خواهید داشت. با طراحی آرمیچر ثابت، یک ترمز در نهایت به سادگی متوقف می شود. این به این دلیل است که شکاف هوا در نهایت برای غلبه بر میدان مغناطیسی بیش از حد بزرگ می شود. شکاف صفر یا آرماتورهای سایش خودکار می توانند تا حدی که تیغ نازک شوند ساییده شوند که در نهایت باعث درگیری از دست رفته می شود.
طراحان می توانند از انرژی انتقال یافته در هر بار درگیر شدن ترمز، عمر را تخمین بزنند. Ee = [m × v2 × τd] / [182 × (τd + τl)] که در آن Ee = انرژی در هر درگیری، m = اینرسی، v = سرعت، τd = گشتاور دینامیکی، و τl = گشتاور بار. دانستن انرژی در هر درگیری به طراح اجازه میدهد تعداد چرخههای درگیری که ترمز طول میکشد محاسبه کند: L = V / (Ee × w) که در آن L = واحد عمر بر حسب تعداد چرخه، V = سطح درگیری کل، و w = نرخ سایش.
عکس العمل
برخی از برنامه ها به دقت بسیار زیادی در بین تمام اجزا نیاز دارند. در این کاربردها، حتی یک درجه جابجایی بین ورودی و خروجی در هنگام درگیر شدن ترمز می تواند مشکل ساز باشد. این در بسیاری از کاربردهای روباتیک صادق است. گاهی اوقات مهندسان طراح ترمزهایی با عکس العمل صفر سفارش می دهند اما سپس آنها را به شفت ها کلید می زنند. بنابراین اگرچه ترمز دارای عکس العمل صفر است، حداقل حرکت می تواند بین توپی کلید شده در شفت باقی بماند.
با این حال، اکثر برنامه ها نیازی به عکس العمل صفر واقعی ندارند و می توانند از اتصال نوع spline استفاده کنند. برخی از این اتصالات بین آرمیچر و توپی اسپلاین استاندارد هستند در حالی که برخی دیگر طرح های هاب شش گوش یا مربع هستند.
اسپلاین بهترین تحمل واکنش اولیه را خواهد داشت – معمولاً زیر دو درجه. اما اسپلاین و انواع دیگر اتصالات می توانند به مرور زمان فرسوده شوند و تلرانس ها افزایش می یابد.
محیط زیست / آلودگی
با سایش ترمزها، ذرات سایش ایجاد می کنند. در برخی از کاربردها مانند اتاق های تمیز یا جابجایی مواد غذایی، این گرد و غبار می تواند یک مشکل آلودگی باشد، بنابراین در این کاربردها، ترمز باید محصور شود تا ذرات دیگر سطوح اطراف آن را آلوده نکنند. اما سناریوی محتمل تر این است که ترمز شانس بیشتری برای آلوده شدن از محیط خود داشته باشد. بدیهی است که روغن یا گریس باید از سطح تماس دور نگه داشته شوند، زیرا ضریب اصطکاک را به میزان قابل توجهی کاهش می دهند، که می تواند گشتاور را به شدت کاهش دهد – به طور بالقوه باعث خرابی می شود. غبار روغن یا ذرات معلق در هوا نیز می توانند باعث آلودگی سطح شوند. گاهی اوقات گرد و غبار کاغذ یا سایر آلودگی ها می توانند بین سطوح تماس قرار گیرند. این همچنین می تواند منجر به از دست دادن گشتاور شود. اگر منبع آلودگی شناخته شده ای وجود داشته باشد، بسیاری از تولیدکنندگان کلاچ سپرهای آلودگی ارائه می دهند که مانع از افتادن مواد در بین سطوح تماس می شود.
در ترمزهایی که مدتی است استفاده نشده اند، زنگ زدگی روی سطوح ایجاد می شود. اما به طور کلی، این معمولاً یک نگرانی عمده نیست زیرا زنگ زدگی در طی چند سیکل درگیری از بین می رود و هیچ تأثیر ماندگاری روی گشتاور وجود ندارد.
انواع دیگر ترمزهای الکترومغناطیسی
مجموعه فنر الکترومغناطیسی و ترمزهای خاموش کننده برق مغناطیسی دائمی
مقدمه – هنگامی که برق به طور تصادفی قطع شود یا عمداً برق قطع شود، ترمزهای خاموش متوقف می شوند یا بار را نگه می دارند. در گذشته، برخی از شرکت ها از این ترمزها به عنوان ترمزهای “ایمن از کار افتادن” یاد می کردند. این ترمزها معمولاً روی موتور الکتریکی یا نزدیک آن استفاده می شوند. کاربردهای معمولی عبارتند از رباتیک، ترمز نگهدارنده برای بال اسکروهای محور Z و ترمزهای سروو موتور. ترمزها در چندین ولتاژ موجود هستند و می توانند دارای هاب برگشتی معمولی یا صفر باشند. همچنین می توان از چندین دیسک برای افزایش گشتاور ترمز بدون افزایش قطر ترمز استفاده کرد. 2 نوع اصلی ترمز نگهدارنده وجود دارد. اولین مورد ترمزهای فنری است. دومی ترمزهای آهنربای دائمی است.
نحوه کار –
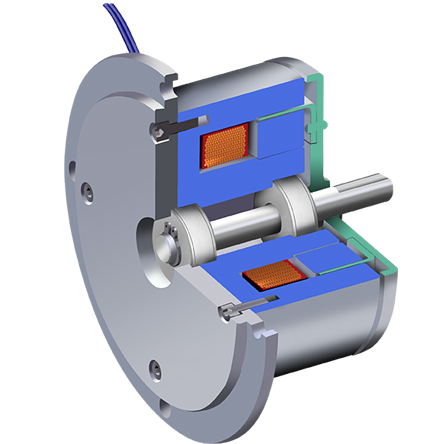
نوع فنر – وقتی هیچ جریان/ولتاژی به ترمز اعمال نمی شود، یک فنر به صفحه فشار فشار می آورد و دیسک اصطکاک را بین صفحه فشار داخلی و صفحه پوشش بیرونی فشرده می کند. این نیروی گیره اصطکاکی به توپی منتقل می شود که به شفت عرضه شده توسط مشتری نصب می شود.
مغناطیس دائمی/ترمز کنترل کشش
مقدمه – ترمزهای کنترل کشش آهنربای دائمی در درجه اول برای محافظت از اضافه بار به عنوان محدود کننده گشتاور یا برای کنترل کشش یک ماده استفاده می شود. این واحدها در درجه اول از قدرت میدان مغناطیسی برای تولید گشتاور پسا استفاده می کنند. واحدهای کوچکتر می توانند از ترکیبی از آهنرباهای دائمی و پودر ذرات مغناطیسی برای کنترل کشش استفاده کنند. اینها در کارخانه تنظیم شده اند تا گشتاور لغزشی خاصی تولید کنند. این محدودکنندههای گشتاور کم هزینه، آنها را برای تغذیه کاغذ، دستگاههای کپی و چاپگرهای شبکه، و همچنین دستگاههای خودپرداز و کیوسکهای بلیط ایدهآل میسازد. واحدهای بزرگتر می توانند تنظیمات گشتاور قابل تنظیمی داشته باشند که توسط کاربر نهایی قابل تغییر است. از آنجایی که واحدها اساساً برای تولید گشتاور به اصطکاک متکی نیستند، ذرات سایش تولید نمی شوند. این آنها را برای هر کاربردهایی که سایش اصطکاکی میتواند باعث آلودگی دستگاه یا محصولی شود که دستگاه تولید میشود، ایدهآل میکند، مانند محیطهای اتاق تمیز، کاربردهای پزشکی و فرآوری مواد غذایی. از آنجایی که عملاً هیچ سایشی در واحدها وجود ندارد، عمر بسیار طولانی دارند که آنها را برای کاربردهای کششی ثابت مانند سیم پیچی سیم، پرداخت فیلم و فویل و سیم پیچ و همچنین محدود کننده های گشتاور کلاهک پیچ و ماشین آلات بست صنعتی مناسب می کند.
چگونه کار می کند – داخل محفظه واحدهای OPL، پودر مغناطیسی وجود دارد. نمای بیرونی واحد OPL فولادی است. ذرات مغناطیسی در امتداد خطوط شار که از آهنرباهای دائمی به محفظه فولادی می روند، یک حلقه مغناطیسی ایجاد می کنند و ذرات به سمت محفظه فولادی می کشند. قدرت آهنربا و مقدار ذرات داخل حفره تعیین کننده گشتاور درگ هر واحد است.
واحدهای بزرگتر OPL از چندین آهنربا استفاده می کنند که پیوندهای قوی تری بین پودر ذرات مغناطیسی و محفظه فولادی ایجاد می کند.
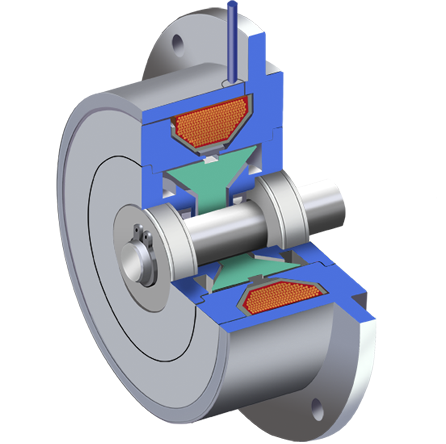
ترمزهای هیسترزیس آهنربای دائم بزرگتر از آهنرباهای منحنی منحنی در تقابل با یکدیگر استفاده می کنند که بر روی یک دیسک هیسترزیس مرکزی که به شفت یا توپی دستگاه متصل است عمل می کنند. در طرف مقابل یک آهنربای یکسان وجود دارد که می تواند حدود 45 درجه بچرخد تا از حداقل به حداکثر گشتاور کششی برسد. در بین دو دیسک مغناطیسی یک دیسک پسماند وجود دارد که توسط شار میدان های مغناطیسی جذب می شود، اما توسط یک فاصله دهنده از هم جدا می شوند.
یک پیچ تنظیم برای حفظ موقعیت آهنرباها نسبت به یکدیگر استفاده می شود. در شرایط حداقل گشتاور، دیسک های مغناطیسی از شمال به جنوب در یک راستا قرار دارند. در این حالت، شار مستقیماً از طریق دیسک هیسترزیس حرکت می کند و حداقل کشش مغناطیسی را روی دیسک وارد می کند.
در شرایط گشتاور متوسط، دیسکها تا حدی چرخانده میشوند، بنابراین کشش کمی بیشتر روی دیسک هیسترزیس وجود دارد. در شرایط حداکثر گشتاور، دیسکها میچرخند تا زمانی که میدانها مستقیماً در مقابل یکدیگر قرار گیرند، بنابراین میدانهای مغناطیسی با یکدیگر برخورد میکنند و باید به صورت محیطی از طریق دیسک حرکت کنند و حداکثر مقدار کشش مغناطیسی را روی دیسک وارد کنند.
چند ترمز دیسکی
مقدمه – از ترمزهای چندگانه دیسکی برای ارائه گشتاور بسیار بالا در فضای نسبتاً کوچک استفاده می شود. از این ترمزها می توان به صورت خشک یا مرطوب (حمام روغن) استفاده کرد. کارکردن ترمزها در حمام روغن نیز قابلیت اتلاف گرما را تا حد زیادی افزایش میدهد، که آنها را برای گیربکسهای چند سرعته، کاربردهای ماشینآلات و گیربکسهای خودرو مناسب میسازد.
چگونه کار می کند – چندین ترمز دیسکی از طریق یک محرک الکتریکی کار می کنند اما گشتاور را به صورت مکانیکی منتقل می کنند. هنگامی که ولتاژ / جریان به سیم پیچ ترمز اعمال می شود، سیم پیچ به یک آهنربای الکتریکی تبدیل می شود و خطوط مغناطیسی شار تولید می کند. این خطوط شار از طریق شکاف هوای کوچک بین میدان و آرمیچر و دیسکهای اصطکاک منتقل میشوند. جاذبه آرمیچر دیسک های اصطکاکی را فشرده (فشرده) می کند و گشتاور را از هاب به دیسک های بیرونی منتقل می کند. محفظه به قسمت ثابت دستگاه متصل است. ترمز می لغزد تا زمانی که دور توپی و محفظه دور در دقیقه صفر شود. معمولاً (2-2 ثانیه) نسبتاً سریع اتفاق می افتد.
هنگامی که جریان/ولتاژ از ترمز حذف می شود، توپی آزاد است تا با شفت بچرخد. فنرهای جداکننده، دیسک اصطکاک را از یکدیگر دور نگه میدارند، بنابراین وقتی کلاچ درگیر نمیشود، هیچ تماسی وجود ندارد و باعث ایجاد حداقل کشش میشود.
اگرچه انیمیشن زیر برای کلاچ ساخته شده است، اما اصل کار همان ترمز است.
ترمز هیسترزیس الکترومغناطیسی
مقدمه – اینها یک ترمز الکترومغناطیسی واقعی هستند. هیسترزیس الکتریکی، اگرچه گشتاور پایینی دارد، اما واحدها دارای محدوده گشتاور قابل کنترل بسیار وسیعی هستند. از آنجایی که این واحدها را می توان دقیقاً کنترل کرد، برای کاربردهای پایه آزمایشی که در آن گشتاور کنترل شده متغیر مورد نیاز است، ایده آل هستند. از آنجایی که گشتاور درگ حداقل است، این واحدها وسیع ترین محدوده گشتاور موجود را در میان محصولات هیسترزیس ارائه می دهند. اکثر برنامههای کاربردی مربوط به واحدهای هیسترزیس برقی در شرایط پایه تست هستند.
چگونه کار می کند – هنگامی که جریان / ولتاژ به میدان اعمال می شود، یک شار مغناطیسی داخلی ایجاد می کند. آن شار سپس به یک دیسک هیسترزیس که از میدان عبور می کند منتقل می شود. دیسک هیسترزیس به شفت ترمز متصل است. یک کشش مغناطیسی روی دیسک هیسترزیس امکان کشیدن ثابت یا توقف نهایی شفت خروجی را فراهم می کند.
هنگامی که جریان/ولتاژ از ترمز حذف می شود، دیسک هیسترزیس آزاد است و هیچ نیروی نسبی بین هر یک از اعضا منتقل نمی شود. بنابراین، تنها گشتاوری که بین ورودی و خروجی مشاهده می شود، درگ یاتاقان است. هیچ تماس فیزیکی دیگری وجود ندارد، تمام گشتاور به صورت مغناطیسی منتقل می شود.
ترمز ذرات الکترومغناطیسی
مقدمه – ترمزهای ذرات/جریان مغناطیسی به دلیل گستره گشتاور عملیاتی گسترده موجود در طراحی خود نسبت به سایر ترمزهای الکترومکانیکی منحصر به فرد هستند. مانند یک ترمز الکترومکانیکی، گشتاور به ولتاژ تقریبا خطی است. با این حال، در یک ترمز ذرات مغناطیسی، گشتاور را می توان بسیار دقیق کنترل کرد (در محدوده دور در دقیقه عملکرد واحد). این باعث می شود این واحدها برای کاربردهای کنترل تنش، مانند سیم پیچی سیم، کنترل کشش فویل و فیلم و کنترل کشش نوار، مناسب باشند. به دلیل پاسخ سریع، آنها همچنین می توانند در برنامه های با چرخه بالا مانند کارت خوان ها، ماشین های مرتب سازی و تجهیزات برچسب زدن استفاده شوند.
چگونه کار می کند – ذرات مغناطیسی (بسیار شبیه براده های آهن) در حفره پودر قرار دارند. بدون هیچ ولتاژ / جریان، آنها در حفره می نشینند. با این حال، هنگامی که ولتاژ / جریان به سیم پیچ اعمال می شود، شار مغناطیسی ایجاد شده، سعی می کند ذرات را به هم متصل کند، تقریباً مانند یک لجن ذرات مغناطیسی. با افزایش ولتاژ/جریان، اتصال ذرات قوی تر می شود. روتور ترمز از میان این ذرات محدود شده عبور می کند. خروجی محفظه به طور سفت و سخت به بخشی از دستگاه متصل است. با شروع اتصال ذرات به هم، نیروی مقاومی روی روتور ایجاد می شود که شفت خروجی را کند می کند و در نهایت متوقف می شود.