| گشتاور الکتروموتور | |
|---|---|

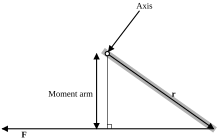
رابطه بین نیروی F ، گشتاور τ ، تکانه خطی p ، و تکانه زاویه ای L در سیستمی که چرخش آن تنها به یک صفحه محدود شده است (نیروها و گشتاورهای ناشی از گرانش و اصطکاک در نظر گرفته نشده است).
|
|
|
نمادهای رایج
|
تی ، م |
| و متحد | N⋅m |
|
واحدهای دیگر
|
pound-force-feet ، lbf ⋅inch، ozf⋅in |
| در واحدهای پایه SI | kg⋅m 2 ⋅s −2 |
| بعد، ابعاد، اندازه | M L 2 T -2 |

| بخشی از یک سریال در |
| مکانیک کلاسیک |
|---|
| اف = د د تی ( متر v ) |
|

|
گشتاور الکتروموتور
در فیزیک و مکانیک ، گشتاور معادل چرخشی نیروی خطی است . [1] ) نیز گفته می شود همچنین به عنوان لحظه نیرو (همچنین به اختصار به لحظه . این نشان دهنده توانایی یک نیرو برای ایجاد تغییر در حرکت چرخشی بدن است. این مفهوم از مطالعات ارشمیدس در مورد استفاده از اهرم ها سرچشمه گرفته است که در نقل قول معروف او منعکس شده است: ” به من یک اهرم و مکانی برای ایستادن بدهید و من زمین را حرکت خواهم داد “. همانطور که یک نیروی خطی یک فشار یا کشش است، گشتاور را می توان به عنوان پیچش به یک جسم حول یک محور خاص در نظر گرفت. گشتاور به عنوان حاصل ضرب بزرگی مولفه عمود نیرو و فاصله خط عمل یک نیرو از نقطه ای که در اطراف آن تعیین می شود، تعریف می شود. برای درک گشتاور نیز می توان از قانون بقای انرژی استفاده کرد. نماد گشتاور به طور معمول است تی , حرف کوچک یونانی tau . نامیده می شود هنگامی که به عنوان لحظه نیرو ، معمولا با M نشان داده می شود .

در سه بعد، گشتاور یک شبه بردار است . برای ذرات نقطه ای به دست می آید ، با حاصل ضرب ضربدری بردار موقعیت ( بردار فاصله ) و بردار نیرو . مقدار گشتاور یک جسم صلب به سه کمیت بستگی دارد: نیروی اعمال شده، بردار بازوی اهرمی [2] که نقطه ای را که گشتاور در آن اندازه گیری می شود به نقطه اعمال نیرو و زاویه بین نیرو و بازوی اهرمی متصل می کند. بردارها در نمادها:
- تی = r × اف
- تی = ” r ” ” اف ” گناه من


جایی که
- تی بردار گشتاور است و تی مقدار گشتاور است،
- r بردار موقعیت (برداری از نقطه ای که گشتاور در اطراف آن اندازه گیری می شود تا نقطه ای که نیرو اعمال می شود) است.
- اف بردار نیرو است،
- × نشاندهنده حاصلضرب متقاطع است که بردار عمود بر r و F را بر اساس قانون سمت راست ایجاد میکند .
- من زاویه بین بردار نیرو و بردار بازوی اهرمی است.




واحد SI برای گشتاور نیوتن متر (N⋅m) است. برای اطلاعات بیشتر در مورد واحدهای گشتاور، § واحدها را ببینید .
تاریخچه گشتاور الکتروموتور
اصطلاح گشتاور (از لاتین torquēre “پیچیدن”) گفته می شود که توسط جیمز تامسون پیشنهاد شد و در آوریل 1884 در چاپ ظاهر شد. [3] [4] [5] استفاده در همان سال توسط Silvanus P. Thompson تأیید شده است. در ویرایش اول Dynamo-Electric Machinery . [5] تامپسون این اصطلاح را چنین انگیزه می دهد: [4]
همانطور که تعریف نیوتنی از نیرو، نیرویی است که ایجاد یا تمایل به ایجاد حرکت (در امتداد یک خط) می کند، گشتاور نیز ممکن است به عنوان نیرویی تعریف شود که ایجاد یا تمایل به ایجاد پیچش (حول یک محور) دارد. بهتر است از اصطلاحی استفاده شود که این عمل را به عنوان یک موجود معین واحد در نظر می گیرد تا از اصطلاحاتی مانند ” زوج ” و ” لحظه ” که ایده های پیچیده تری را پیشنهاد می کنند. مفهوم منفرد پیچشی که برای چرخاندن شفت اعمال میشود بهتر از مفهوم پیچیدهتر اعمال نیروی خطی (یا یک جفت نیرو) با یک اهرم معین است.
امروزه گشتاور به استفاده از واژگان مختلف بسته به موقعیت جغرافیایی و گشتاور الکتروموتور رشته تحصیلی گفته می شود. این مقاله از تعریف استفاده شده در فیزیک ایالات متحده در استفاده از کلمه گشتاور پیروی می کند . [6]
در انگلستان و در مهندسی مکانیک ایالات متحده ، گشتاور به ممان نیرو گفته می شود که معمولاً به لحظه کوتاه می شود . [7] این اصطلاح را می توان حداقل در سال 1811 در سیمئون دنیس پواسون Traité de mécanique جستجو کرد . [8] ترجمه انگلیسی آثار پواسون در سال 1842 منتشر شد.
تعریف و ارتباط با تکانه زاویه ای

نیرویی که عمود بر اهرم وارد می شود ضربدر فاصله آن از تکیه گاه اهرم (طول بازوی اهرم ) گشتاور آن است. برای مثال، نیروی سه نیوتن که در دو متری نقطه تکیهگاه اعمال میشود، همان گشتاوری را اعمال میکند که نیروی یک نیوتن در شش متری تکیهگاه اعمال میشود. جهت گشتاور را می توان با استفاده از قانون گرفتن دست راست تعیین کرد: اگر انگشتان دست راست از جهت بازوی اهرمی به سمت جهت نیرو جمع شوند، آنگاه انگشت شست در جهت گشتاور است. [9]
به طور کلی تر، گشتاور روی یک ذره نقطه ای (که موقعیت r را در برخی از چارچوب های مرجع دارد) می تواند به عنوان محصول متقاطع تعریف شود :
- تی = r × اف ،

که در آن F نیروی وارد بر ذره است. بزرگی τ گشتاور با استفاده از
- تی = r اف گناه من ،

که در آن F مقدار نیروی اعمال شده و θ زاویه بین بردارهای موقعیت و نیرو است. متناوبا، از سوی دیگر،
- تی = r اف ⊥ ،

که در آن F ⊥ مقدار نیرویی است که به طور عمود بر موقعیت ذره هدایت می شود. هر نیرویی که موازی با بردار موقعیت ذره باشد، گشتاور تولید نمی کند. [10] [11]
از ویژگی های حاصلضرب متقاطع بر می آید که بردار گشتاور بر هر دو بردار موقعیت و نیرو عمود است . برعکس، بردار گشتاور صفحه ای را که بردارهای موقعیت و نیرو در آن قرار دارند را مشخص می کند. حاصل جهت بردار گشتاور توسط قانون دست راست تعیین می شود. [10]
بدن را تعیین می کند گشتاور خالص روی یک بدنه میزان تغییر تکانه زاویه ای .
- تی = د L د تی

که در آن L بردار تکانه زاویه ای و t زمان است.
برای حرکت یک ذره نقطه ای،
- L = من اوه ،

که در آن I لحظه اینرسی و ω مداری است شبه بردار سرعت زاویه ای . نتیجه می شود که
- تی n ه تی = د L د تی = د ( من اوه ) د تی = من د اوه د تی + د من د تی اوه = من آ + د ( متر r 2 ) د تی اوه = من آ + 2 r پ | | اوه ،

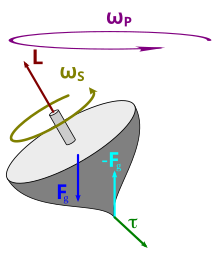
که α است شتاب زاویه ای ذره و p || جزء شعاعی تکانه خطی آن است . این معادله مشابه چرخشی قانون دوم نیوتن برای ذرات نقطه ای است و برای هر نوع مسیری معتبر است. توجه داشته باشید که اگرچه نیرو و شتاب همیشه موازی و مستقیم هستند، گشتاور τ لازم نیست موازی یا مستقیماً با شتاب زاویه ای α باشد . این از این واقعیت ناشی می شود که گرچه جرم همیشه حفظ می شود، ممان اینرسی به طور کلی حفظ نمی شود.
در برخی موارد ساده مانند یک دیسک چرخان، ممان اینرسی ثابت است، قانون دوم نیوتن چرخشی می تواند باشد.

جایی که من = متر r 2 و آ = د اوه د تی .


اثبات هم ارزی تعاریف
تعریف تکانه زاویه ای برای یک ذره نقطه ای به شرح زیر است:

که در آن p ذره تکانه خطی و r بردار موقعیت از مبدا است. مشتق زمانی این است:

این نتیجه را می توان به راحتی با تقسیم بردارها به اجزاء و اعمال قانون محصول اثبات کرد . حال با استفاده از تعریف نیرو اف = د پ د تی (ثابت بودن یا نبودن جرم) و تعریف سرعت د r د تی = v



ضرب ضربدری تکانه پ با سرعت مرتبط با آن v صفر است زیرا سرعت و تکانه موازی هستند، بنابراین جمله دوم ناپدید می شود.


طبق تعریف، گشتاور τ = r × F . بنابراین، گشتاور روی یک ذره است برابر اولین مشتق از تکانه زاویه ای آن نسبت به زمان.
اگر چندین نیرو اعمال شود، قانون دوم نیوتن به جای آن F net = m a را می خواند و نتیجه می شود که

این یک اثبات کلی برای ذرات نقطه ای است.
اثبات را می توان با اعمال برهان بالا برای هر یک از ذرات نقطه ای و سپس جمع کردن تمام ذرات نقطه ای به سیستمی از ذرات نقطه ای تعمیم داد. به طور مشابه، اثبات را می توان با اعمال برهان بالا برای هر نقطه از جرم، و سپس ادغام بر روی کل جرم، به یک جرم پیوسته تعمیم داد.
واحدهای گشتاور الکتروموتور
گشتاور دارای بعد نیرو ضربدر فاصله است که به طور نمادین T -2 L 2 M است . اگرچه این ابعاد اساسی مانند انرژی یا کار است ، ادبیات رسمی SI پیشنهاد می کند که از واحد نیوتن متر (N⋅m) استفاده شود و هرگز از ژول استفاده نشود . [12] [13] واحد نیوتن متر به درستی N⋅m نشان داده می شود. [13]
واحدهای سنتی امپراتوری و مرسوم ایالات متحده برای گشتاور عبارتند از پوند فوت (lbf-ft) یا برای مقادیر کوچک پوند اینچ (lbf-in). در ایالات متحده، گشتاور معمولاً به عنوان فوت پوند (با پوند فوت یا فوت پوند) و اینچ پوند (که با پوند نشان داده می شود) نامیده می شود. [14] [15] تمرینکنندگان گشتاور الکتروموتور به زمینه و خط تیره در مخفف بستگی دارند تا بدانند که اینها به گشتاور اشاره دارند و نه انرژی یا لحظه جرم (همانطور که نماد ft-lb به درستی نشان میدهد).
موارد خاص گشتاور الکتروموتور و حقایق دیگر
فرمول بازوی لحظه ای گشتاور الکتروموتور
یک مورد خاص بسیار مفید که اغلب به عنوان تعریف گشتاور در زمینه هایی غیر از فیزیک ارائه می شود، به شرح زیر است:
- تی = ( بازوی لحظه ای ) ( زور ) .

ساختار “بازوی لحظه ای” به همراه بردارهای r و F که در بالا ذکر شد در شکل سمت راست نشان داده شده است. مشکل این تعریف این است که جهت گشتاور را نشان نمی دهد بلکه فقط مقدار آن را نشان می دهد و از این رو استفاده از آن در موارد سه بعدی دشوار است. اگر نیرو بر بردار جابجایی r عمود باشد ، بازوی لحظه ای برابر با فاصله تا مرکز خواهد بود و گشتاور برای نیروی داده شده حداکثر خواهد بود. معادله بزرگی گشتاور ناشی از نیروی عمودی:
- تی = ( فاصله تا مرکز ) ( زور ) .

به عنوان مثال، اگر فردی نیرویی برابر با 10 نیوتن را در انتهای انتهایی آچاری به طول 0.5 متر گشتاور الکتروموتور قرار دهد (یا نیروی 10 نیوتن را در فاصله 0.5 متری از نقطه پیچ آچاری با هر طولی اعمال کند)، گشتاور خواهد بود. 5 N⋅m – با فرض اینکه فرد آچار را با اعمال نیرو در صفحه حرکت و عمود بر آچار حرکت دهد.
تعادل ایستا گشتاور الکتروموتور
برای اینکه جسمی در تعادل ایستا باشد ، نه تنها باید مجموع نیروها صفر باشد، بلکه باید مجموع گشتاورها (لحظه ها) در مورد هر نقطه نیز باشد. برای یک موقعیت دو بعدی با نیروهای افقی و عمودی، مجموع نیروهای مورد نیاز دو معادله است: Σ H = 0 و Σ V = 0 ، و گشتاور یک معادله سوم: Σ τ = 0 . یعنی برای حل مسائل تعادلی تعیین استاتیکی در دو بعدی از سه معادله استفاده می شود.
نیروی خالص در مقابل گشتاور الکتروموتور
هنگامی که نیروی خالص وارد بر سیستم صفر است، گشتاور اندازه گیری شده از هر نقطه در فضا یکسان است. به عنوان مثال، گشتاور در یک حلقه حامل جریان در یک میدان مغناطیسی یکنواخت بدون توجه به نقطه مرجع یکسان است. اگر نیروی خالص اف صفر نیست و تی 1 گشتاور اندازه گیری شده از r 1 ، سپس گشتاور اندازه گیری شده از r 2 است




گشتاور الکتروموتور ماشین
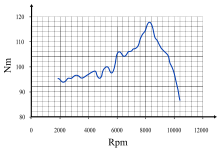
گشتاور بخشی از مشخصات اولیه موتور را تشکیل می دهد : توان خروجی یک موتور به صورت گشتاور ضرب در سرعت زاویه ای محور محرک بیان می شود. موتورهای احتراق داخلی تنها در محدوده محدودی از سرعتهای چرخشی (معمولاً از 1000 تا 6000 دور در دقیقه برای یک ماشین کوچک) گشتاور مفیدی تولید میکنند. می توان گشتاور خروجی متغیر را در آن محدوده با دینامومتر اندازه گیری کرد و آن را به صورت منحنی گشتاور نشان داد.
موتورهای بخار و موتورهای الکتریکی تمایل به تولید حداکثر گشتاور نزدیک به دور در دقیقه دارند، با افزایش سرعت چرخش (به دلیل افزایش اصطکاک و سایر محدودیت ها) گشتاور کاهش می یابد. موتورهای بخار رفت و برگشتی و موتورهای الکتریکی می توانند بارهای سنگین را از دور صفر بدون کلاچ راه اندازی کنند .
رابطه بین گشتاور الکتروموتور ، قدرت و انرژی
اگر به نیرویی است اجازه داده شود در فاصله ای عمل کند، در حال انجام کار مکانیکی . به طور مشابه، اگر گشتاور اجازه داشته باشد از طریق یک جابجایی زاویه ای عمل کند، در حال انجام کار است. از نظر ریاضی، برای چرخش حول یک محور ثابت از طریق مرکز جرم ، کار W را می توان به صورت بیان کرد.
- دبلیو = 🔻 من 1 من 2 تی د من ،

که τ گشتاور است و θ1 نشان و θ2 (به ترتیب ) موقعیتهای زاویهای اولیه و نهایی بدنه را میدهند. [16]
اثبات گشتاور الکتروموتور
کار انجام شده توسط نیروی متغیری که بر روی یک جابجایی خطی محدود اعمال می شود س با ادغام نیرو با توجه به جابجایی خطی عنصری داده می شود د س


- دبلیو = 🔻 س 1 س 2 اف ⋅ د س

با این حال، جابجایی خطی بینهایت کوچک د س مربوط به جابجایی زاویه ای مربوطه است د من و بردار شعاع r مانند

- د س = د من × r

جایگزینی در عبارت بالا برای کار می دهد
- دبلیو = 🔻 س 1 س 2 اف ⋅ د من × r

بیان اف ⋅ د من × r یک محصول سه گانه اسکالر است که توسط [ اف د من r ] . یک عبارت جایگزین برای همان حاصل ضرب سه گانه اسکالر است

![ball نماد {\theta}}\,\mathbf {r} \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2a3689ca28aa6ebcf841de77f0e15c61380ddcfe)
- [ اف د من r ] = r × اف ⋅ د من
![{\style display \left[\mathbf {F}\,\mathrm {d} {\ball symbol {\theta}}\,\mathbf { r} \right]=\mathbf{r}\times\mathbf{F}\cdot\mathrm{d}{\ballsymbol{\theta}}} {\displaystyle {\ballsymbol{\tau}}=\mathbf{r }](https://wikimedia.org/api/rest_v1/media/math/render/svg/6cab3500ce62d8ce0cdf1464a35d2a54ef7b4ca6)
اما طبق تعریف گشتاور،
- تی = r × اف

جایگزینی متناظر در بیان کار می دهد،
- دبلیو = 🔻 س 1 س 2 تی ⋅ د من

از آنجایی که پارامتر ادغام از جابجایی خطی به جابجایی زاویه ای تغییر کرده است، محدودیت های ادغام نیز به همین ترتیب تغییر می کند،
- دبلیو = 🔻 من 1 من 2 تی ⋅ د من

اگر گشتاور و جابجایی زاویه ای در یک جهت باشند، آنگاه حاصل ضرب اسکالر به یک ضرب بزرگی کاهش می یابد. یعنی تی ⋅ د من = | تی | | د من | cos 0 = تی د من دادن

- دبلیو = 🔻 من 1 من 2 تی د من

برمیآید از اصل کار-انرژی که W همچنین نشاندهنده تغییر انرژی جنبشی چرخشی Er بدن است که توسط
- E r = 1 2 من اوه 2 ،

که در آن I لحظه اینرسی جسم و ω آن است سرعت زاویه ای . [16]
توان کار در واحد زمان است که توسط
- پ = تی ⋅ اوه ،

که در آن P قدرت، τ گشتاور، ω است سرعت زاویه ای ، و ⋅ را نشان می دهد محصول اسکالر .

از نظر جبری، معادله ممکن است برای محاسبه گشتاور برای سرعت زاویهای معین و توان خروجی مجدداً مرتب شود. توجه داشته باشید که توان تزریق شده توسط گشتاور فقط به سرعت زاویه ای آنی بستگی دارد – نه به افزایش، کاهش یا ثابت ماندن سرعت زاویه ای در حین اعمال گشتاور (این معادل حالت خطی است که در آن توان تزریق شده توسط یک نیرو. فقط به سرعت لحظه ای بستگی دارد – نه به شتاب حاصل، در صورت وجود).
مشاهده کرد در عمل، این رابطه را میتوان در دوچرخهها گفته میشود : دوچرخهها معمولاً از دو چرخ جاده تشکیل میشوند، دندههای جلو و عقب (که به آن چرخ دندهها ) که با یک زنجیر مشبک میشوند ، و یک مکانیسم دنده دنده است اگر سیستم انتقال دوچرخه اجازه میدهد نسبتهای دندههای چندگانه را تنظیم کند، . استفاده می شود (یعنی دوچرخه چند سرعته )، که همه آنها به قاب وصل شده است . دوچرخهسوار چرخدنده ، شخصی که دوچرخهسواری میکند، نیروی ورودی را با چرخاندن پدالها تأمین میکند و در نتیجه جلویی را میچرخاند (که معمولاً به آن زنجیر میگویند ). توان ورودی ارائه شده توسط دوچرخه سوار برابر است با حاصل ضرب سرعت زاویه ای (یعنی تعداد دور پدال در دقیقه ضربدر 2 π ) و گشتاور در دوک دوچرخه میل لنگ . دوچرخه، پیشرانه نیروی ورودی را به چرخ جاده منتقل می کند ، که به نوبه خود توان دریافتی را به عنوان توان خروجی دوچرخه به جاده منتقل می کند. بسته به نسبت دنده دوچرخه، یک جفت ورودی (گشتاور، سرعت زاویه ای) به یک جفت خروجی (گشتاور، سرعت زاویه ای) تبدیل می شود . با استفاده از دنده عقب بزرگتر، یا با تعویض دنده پایین تر در دوچرخه های چند سرعته، سرعت زاویه ای چرخ های جاده کاهش می یابد در حالی که گشتاور افزایش می یابد که حاصل آن (یعنی قدرت) تغییر نمی کند.
برای واحدهای SI، واحد قدرت وات ، واحد گشتاور الکتروموتور نیوتن متر و واحد سرعت زاویه ای رادیان در ثانیه است (نه دور در دقیقه و نه دور در ثانیه).
واحد نیوتن متر معادل ژول از نظر ابعادی است که واحد انرژی است. در مورد گشتاور، واحد به یک بردار اختصاص داده می شود ، در حالی که برای انرژی اختصاص داده می شود ، به یک اسکالر . این بدان معنی است که هم ارزی ابعادی نیوتن متر و ژول ممکن است در مورد اول اعمال شود، اما در مورد دوم نه. این مشکل در تحلیل جهتگیری ، که رادیان را بهعنوان یک واحد پایه به جای یک واحد بیبعد در نظر میگیرد، بررسی میشود. [17]
تبدیل به واحدهای دیگر گشتاور الکتروموتور
هنگام استفاده از واحدهای مختلف قدرت یا گشتاور ممکن است ضریب تبدیل لازم باشد. به عنوان مثال، اگر سرعت گشتاور الکتروموتور چرخشی (واحد: دور در دقیقه یا ثانیه) به جای سرعت زاویه ای (واحد: رادیان بر ثانیه) استفاده شود، باید در 2 رادیان π در هر دور ضرب کنیم. در فرمول های زیر، P توان، τ گشتاور، و ν ( حرف یونانی nu ) سرعت چرخش است.
- پ = تی ⋅ 2 پی ⋅ n

نمایش واحدها:
- پ دبلیو = تی ن ⋅ متر ⋅ 2 پی r آ د / r ه v ⋅ n r ه v / س

تقسیم بر 60 ثانیه در دقیقه موارد زیر را به ما می دهد.
- پ دبلیو = تی ن ⋅ متر ⋅ 2 پی r آ د / r ه v ⋅ n r ه v / متر من n 60 س / متر من n

که در آن سرعت چرخش بر حسب دور در دقیقه است (دور در دقیقه، دور بر دقیقه).
برخی از افراد (به عنوان مثال، مهندسان خودرو آمریکایی) از اسب بخار (مکانیکی) برای قدرت، فوت پوند (lbf⋅ft) برای گشتاور و دور در دقیقه برای سرعت چرخش استفاده می کنند. این منجر به تغییر فرمول به:
- پ ساعت پ = تی ل ب f ⋅ f تی ⋅ 2 پی r آ د / r ه v ⋅ n r ه v / متر من n 33 ، 000 .

ثابت زیر (بر حسب فوت پوند در دقیقه) با تعریف اسب بخار تغییر می کند. به عنوان مثال، با استفاده از اسب بخار متریک، تقریباً 32550 می شود.
استفاده از واحدهای دیگر (به عنوان مثال، BTU در ساعت برای برق) به یک ضریب تبدیل سفارشی متفاوت نیاز دارد.
مشتق گشتاور الکتروموتور
برای یک جسم در حال چرخش، فاصله خطی تحت پوشش در محیط چرخش حاصل ضرب شعاع با زاویه تحت پوشش است. یعنی: فاصله خطی = شعاع × فاصله زاویه ای. و طبق تعریف فاصله خطی = سرعت خطی × زمان = شعاع × سرعت زاویه ای × زمان.
با تعریف گشتاور: گشتاور = شعاع × نیرو. میتوانیم این را دوباره مرتب کنیم تا نیرو = شعاع ÷ گشتاور را تعیین کنیم. این دو مقدار را می توان در تعریف قدرت جایگزین کرد :
- قدرت = زور ⋅ فاصله خطی زمان = ( گشتاور r ) ⋅ ( r ⋅ سرعت زاویه ای ⋅ تی ) تی = گشتاور ⋅ سرعت زاویه ای .
![{\displaystyle {\begin{aligned}{\text{power}}&={\frac {{\text{force}}\cdot {\text{linear distance}}}{\text{time}}}\\ [6pt]&={\frac {\left({\dfrac {\text{torque}}{r}}\right)\cdot (r\cdot {\text{گوشی سرعت}}\cdot t)}{t }}\\[6pt]&={\text{گشتاور}}\cdot {\text{ سرعت زاویهای}}.\end{تراز شده}}} {\displaystyle {\text{power}}={\text{](https://wikimedia.org/api/rest_v1/media/math/render/svg/4382d186e4085de735546ad46847d852af843fcb)
شعاع r و زمان t از معادله خارج شده اند. با این حال، سرعت زاویه ای باید بر حسب رادیان گشتاور الکتروموتور در واحد زمان باشد، با رابطه مستقیم فرض شده بین سرعت خطی و سرعت زاویه ای در ابتدای مشتق. اگر سرعت دورانی بر حسب دور در واحد زمان اندازهگیری شود، سرعت خطی و فاصله به نسبت 2 π در مشتق بالا افزایش مییابد تا به دست آید:
- قدرت = گشتاور ⋅ 2 پی ⋅ سرعت چرخشی .

اگر گشتاور بر حسب نیوتن متر و سرعت چرخش بر حسب دور بر ثانیه باشد، معادله فوق توان را بر حسب نیوتن متر بر ثانیه یا وات می دهد. اگر از واحدهای امپریال استفاده شود، و اگر گشتاور بر حسب پوند نیرو و سرعت چرخش بر حسب دور در دقیقه باشد، معادله فوق توان را بر حسب پوند-نیروی در دقیقه میدهد. سپس گشتاور الکتروموتور شکل اسب بخار معادله با اعمال ضریب تبدیل 33000 فوت⋅lbf/min در هر اسب بخار بدست می آید:
- قدرت = گشتاور ⋅ 2 پی ⋅ سرعت چرخشی ⋅ فوت ⋅ lbf دقیقه ⋅ اسب بخار 33 ، 000 ⋅ فوت ⋅ lbf دقیقه ≈ گشتاور ⋅ دور در دقیقه 5 ، 252
![{\displaystyle {\begin{aligned}{\text{power}}&={\text{torque}}\cdot 2\pi \cdot {\text{rotational speed}}\cdot {\frac {{\text{ ft}}{\cdot }{\text{lbf}}}{\text{min}}}\cdot {\frac {\text{horsepower}}{33000\cdot {\frac {{\text{ft}} \cdot {\text{lbf}}}{\text{min}}}}}\\[6pt]&\approx {\frac {{\text{torque}}\cdot {\text{RPM}}} 5,252}}\end{تراز شده}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/71f6394786e06bd8fb53a08ea0161897cf0ed9f9)
زیرا 5252.113122 ≈ 33 ، 000 2 پی .

اصل لحظه ها گشتاور الکتروموتور
اصل گشتاورها که به عنوان قضیه واریگنون به همین نام اشتباه نشود نیز شناخته میشود (با قضیه هندسی ) بیان میکند که گشتاور الکتروموتور حاصل در اثر چندین نیروی اعمال شده به حدود یک نقطه برابر است با مجموع گشتاورهای کمککننده:
- تی = r 1 × اف 1 + r 2 × اف 2 + … + r ن × اف ن .

از این نتیجه میشود که گشتاورهای حاصل از دو نیرویی که در اطراف یک محور بر روی یک جسم وارد میشوند، وقتی متعادل میشوند.
- r 1 × اف 1 + r 2 × اف 2 = 0 .

ضرب کننده گشتاور گشتاور الکتروموتور
گشتاور را می توان از طریق سه روش ضرب کرد: با قرار دادن نقطه تکیه به گشتاور الکتروموتور طوری که طول یک اهرم افزایش یابد. با استفاده از یک اهرم بلندتر؛ یا با استفاده از گیربکس یا جعبه دنده کاهنده سرعت . چنین مکانیزمی با کاهش سرعت چرخش، گشتاور را چند برابر می کند.